
1.ブラケット類は簡単プラ製
ロボット製作の醍醐味はソフト製作でしょうかハード製作でしょうか?正解は両方です!
ということでロボット本体の製作に取り掛かります。基本構造は前回の通り。骨格はサーボブラケットと兼用です。
材質は、かっこいいアルミ製などにトライしたいのですが、加工手段を持っていなためまずは樹脂製でやってみます。今回のロボットはサーボが小さく、重量やトルクも大したこと無いなんとかなるでしょう。
図面引いて3Dプリンタって方法もありますが、CADも3Dプリンタも持ってないのでアクリル板を手加工してみます。
2.現物合わせに四苦八苦
樹脂製のブラケット製作ですが、廃材再利用のアクリル板を活用してみました。5㎜厚と3㎜厚のアクリル板を細く切断したり削ったりして、必要な幅の角棒に加工します。

サーボの取付け向きなどに合わせた長さにカットし、にネジ穴をあけてサーボと締結します。
サーボ本体の取付けはM2ネジを使います。下穴はφ1.5。
サーボホーンの取付けはM1.2で下穴はφ1.0。
ネジを取り付けるためにタップも買ったのですが、タップ加工無しの方ががっちり締結出来たので不要でした。タッピングネジじゃなくても、下穴だけでネジが効きます。
3.サーボホーン取付け時の注意点
今回使用するSG90は、作動範囲が180°しかありません。サーボホーン取付け位置には注意しないと、動かしたい範囲で動かせません。サーボホーンを取り付ける際にはサーボをセンター位置(0~180°の90°)にセットした上で、サーボホーンを関節可動範囲の中央位置になる様取り付けます。ただしサーボの歯車位置の都合でちょうど90°には出来ないケースがほとんどです。この様な場合はソフト的にトリムを掛けましょう。幸いなことにSG90の作動範囲は180°とされていますが、実際には200°くらいは動きます。
4.とにかく形になりました。
加工にはそれなりに手間がかかりましたが、なんとか形になりました。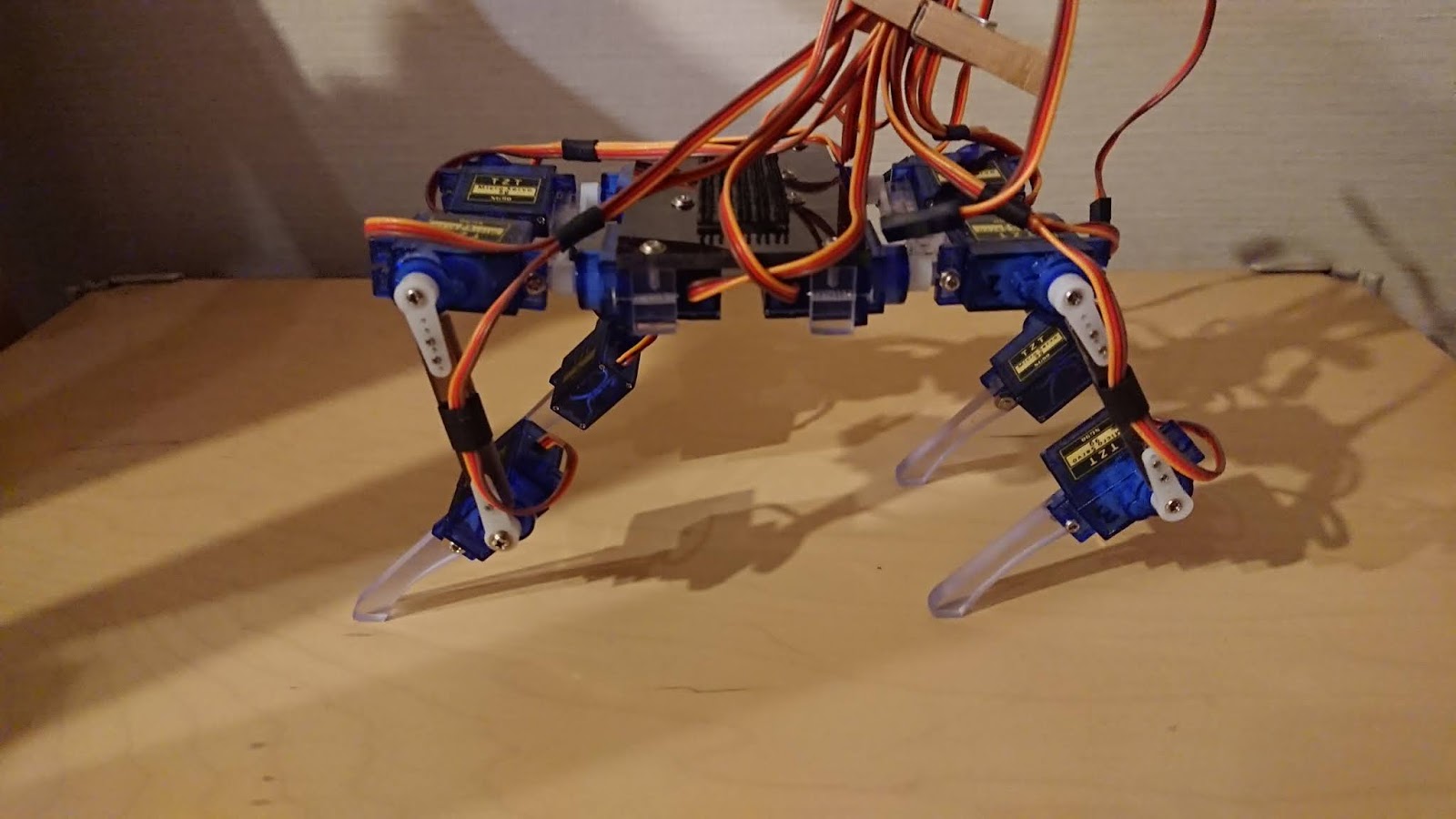



形になって分かったのですが(組み立てながらうすうす気付いてはいましたが)、圧倒的強度不足&加工精度不足です。
加工の手間を減らすため、サーボブラケットは、サーボホーン側のみの片支え構造にしています。この構造は、軽量化や脚の可動範囲の確保にも役立つと考えて採用しました。
強度不足対策のため、厚さ5㎜のアクリル板を使い、十分な剛性を持たせていたのですが想定していなかった弱点はサーボホーンの強度でした。ブラケットはがっちりしてますが、サーボホーンの付け根がグニャグニャ曲がっています。。。内蔵ギヤの軸も動いているのかな?
2号機では、サーボホーンの反対側にフリーホーンを取り付けるのが無難ですね。
また、加工精度不足、サーボのトリム不足、剛性不足もろもろ相まって、4本脚を同じ姿勢にすると同時に着地出来ていない模様。そもそも剛性不足のフニャフニャくんなのでどの程度の寸法誤差がでているのかよく判りませんが。
5.まとめ
勢いで作った初号機ですので不具合が出るのは想定内です。それにしても剛性不足でろくに立つことも出来ない姿はまさに生まれたての子鹿の様相です。改めて命名「バンビ1号」。
とは言え、2号機製作に向けてのノウハウはいろいろ獲得できたように思います。
バンビ1号君も無駄にはせず、歩行動作プログラムの検証用に利用したいと思います。

0 件のコメント:
コメントを投稿